Soft robots can outshine their rigid counterparts in a whole variety of ways—for example, squeezing through tight spaces or sensing and carefully interacting with their surrounding environment.
To be useful in real-world applications, however, a soft robot typically requires many sensors to provide information about what the robot is doing—as well as its overall state, such as whether it’s bending, stretching, twisting or being compressed.
In general, adding more sensors to get better status information also dramatically increases the computation, data acquisition, and signal processing load.
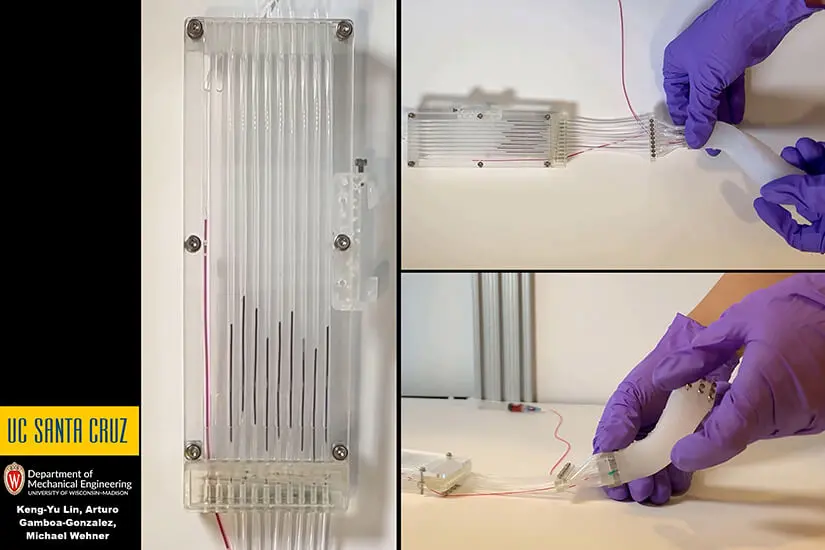 The researchers’ soft robot sensor system. Image credit: Keng-Yu Lin.
The researchers’ soft robot sensor system. Image credit: Keng-Yu Lin.
“Each sensor requires electronic circuitry, so there are a lot of wires that need to go into the soft robot system,” says Michael Wehner, who joined the University of Wisconsin-Madison as an assistant professor of mechanical engineering in January 2022. “In addition, you need a lot of processing power, because each dedicated channel needs to feed back to a controller and requires significant signal processing and computation before you can use the signal. So, you need big data acquisition systems and this adds to the cost and complexity of the soft robot system.”
Now, Wehner and his collaborators have developed a system of passive sensors that can sense the entire state of a soft robot with less cost and complexity.
The researchers’ sensing platform uses fiber-based and microfluidic sensors that present position and pressure data to an inexpensive digital camera for real-time or offline data processing. The team detailed its advance in a paper published recently in the journal Electronics.
“This advance opens the door to a broad spectrum of sensing capabilities using minimal input into a computer controller,” Wehner says. “It allows us to get more robust state information, which could enable many applications for soft robots.”
For this project, the team embedded nine fiber-based displacement sensors within an elastomeric (i.e. rubber) “finger.” Each fiber extended all the way through the finger and routed out to a nearby display assembly, where a digital camera read the fiber sensor positions. As the researchers manipulated the finger into different positions, the fibers in the display assembly moved in a corresponding way.
“We can track the motion of the fibers in the display assembly to know whether that part of the finger is in tension or compression,” Wehner says. “By knowing the position of all the fiber sensors, we can sense the whole state of the system. For instance, if all of them are in tension, then someone is pulling on the finger.”
In addition, the researchers embedded a separate microfluidic channel in the finger that also routed out to the display assembly. When they squeezed the finger, it caused fluid to move out of the finger and through a channel in the display assembly, allowing the researchers to sense the pressure.
“With this system, we have developed sensors which allow us to take many measurements using a single camera,” Wehner says. “This work is a great step forward toward solving key challenges in the soft robotics field.”
Keng-Yu Lin, a PhD student in the Department of Electrical and Computer Engineering at the University of California, Santa Cruz, is the first author on the paper. Arturo Gamboa-Gonzalez, also of UC-Santa Cruz, is a co-author on the paper.
Watch videos about the sensor system on this YouTube channel.
S5 Multi-mode Free Movement Deformation Demo