Set it and forget it. That’s the wish of every homeowner who’s trying to fit mowing the lawn into an already busy weekend. It’s also the logic driving (pun intended) autonomous lawn mower technology under development at the University of Wisconsin-Madison.
The UW-Madison researchers, led by Civil and Environmental Engineering Professor Xiaopeng Li, are translating their expertise in autonomous vehicles to a riding lawnmower. Li and his students are accustomed to working with full-size vehicles like cars—so creating a module to control the mower took a little bit of reverse-engineering, as well as adapting some of the systems they’ve previously used on autonomous cars.

The module is essentially the mower’s brain; the researchers can use it to program routes using GPS coordinates that the mower then follows. The team solved lots of little challenges along the way—for example, controlling turns. “Most of the time for four-wheeled vehicles, we use the turning ratio (moving a steering wheel by some amount turns a vehicle’s wheels by a corresponding amount) for moving left and right,” says Zhaohui Liang, a PhD student in Li’s group. “But this mower is different. It turns based on the speed differential between its left and right wheels. That’s a dynamic function that’s very different from other vehicles we’ve worked with—and we had to develop new code for it.”
That work paid off. In March 2024, Liang and fellow PhD student Peng Zhang successfully tested the mower, which followed a prescribed route without additional input from a human driver. With continued testing to verify the mower can navigate simple routes on its own, the team will next focus on how it will traverse more complicated paths and terrain.
“The first phase of this project was to prove that this concept could work at all,” Li says. “We’ve completed that phase and have the mower autonomously operating. For the next phase, we’re focusing on coming up with good algorithms to help it navigate not only on flat terrain but to go through hilly areas and to deal with different obstacles to be able to do its job.”
Li has long researched connected and autonomous vehicles and the roles they might play in our lives as technology matures. While traditional cars and trucks most often grab headlines for autonomous vehicle development, Li says this project demonstrates how the technology will proliferate into vehicles like lawn mowers or snow plows.
“Cars are usually the first vehicles to get advances in autonomy, and then those developed technologies filter to vehicles in different areas,” Liang says. “Once those technologies that help with things like perception, localization and control are developed for cars, it’s easier to move them down into things like this mower.”
Ultimately, work on this project may carry over to autonomous vehicle categories, just as it already has drawn on experience working with autonomous cars. For example, Li’s lab group also is focusing on autonomous pavement crack-filling machines. “That’s another device that’s quite similar to the mower,” Zhang says. “So we might be able to migrate this module we’ve developed to a new machine and see how well it works for different tasks. That’s a really exciting concept, to me.”
Glenn Bower, a UW-Madison mechanical engineering scientist and teaching faculty member, also is assisting with the project.
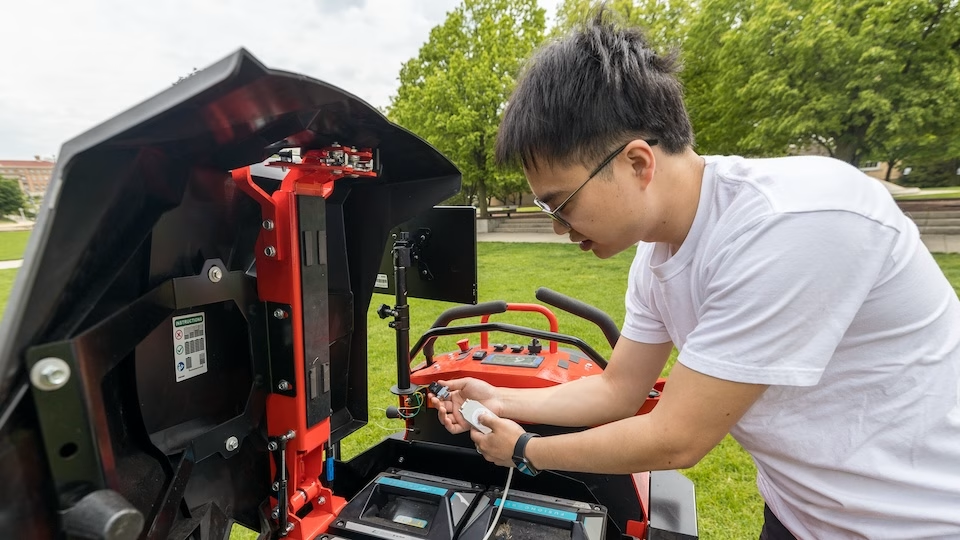
Featured image caption: Zhaohui Liang, a civil and environmental engineering PhD student in Professor Xiaopeng Li’s research group, works on a control unit his team implemented into a lawnmower to enable autonomous driving. The research group has translated some of its work on autonomous cars to testing on a lawnmower. Photo by Joel Hallberg.