NASA is planning a 2023 mission to send the VIPER rover to the moon, where it will traverse the lunar surface as it searches for ice—and University of Wisconsin-Madison engineers are helping to ensure the rover is able to remain on task.
 Dan Negrut
Dan Negrut
When vehicles drive across extraterrestrial surfaces, they risk getting stuck in rocky areas or in soft terrain. “NASA wants to avoid the catastrophic failure that happened when the Spirit rover got stuck in sand on Mars and was unable to free itself, ending its mission,” says Dan Negrut, the Mead Witter Foundation Professor of Mechanical Engineering at UW-Madison.
To help tackle this challenge, Negrut and his students are working on a NASA-funded project to simulate how the VIPER rover will travel on the moon’s surface. They are leveraging Project Chrono, an open-source physics simulation engine developed at UW-Madison in collaboration with scientists from Italy. This software allows the researchers to model complex mechanical systems, such as full rovers operating on deformable soil.
Negrut sees computer simulation as a powerful tool for solving engineering problems, especially in cases where it’s too expensive or impractical to conduct actual tests out in the field.
“Of course, it’s not feasible for us to go to the moon to test out the rover, come back to earth and make design changes to the vehicle, and then return to the moon,” Negrut says. “So my goal is to harness computer simulations to predict how a rover with a certain design is going to move on the moon—without having to actually go to the moon to test it.”
For the NASA project, Negrut and his team in the Simulation-Based Engineering Lab (SBEL) are creating comprehensive simulations that include models of the rover and its wheels, the lunar terrain, the gravitational pull and the vehicle’s interaction with the soil.
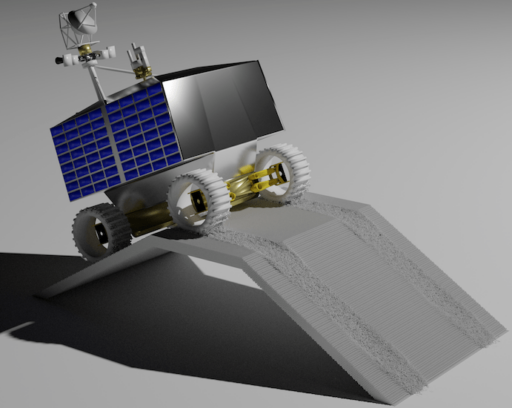 An image from the researchers’ simulation of the VIPER rover driving on uphill granular material terrain.
An image from the researchers’ simulation of the VIPER rover driving on uphill granular material terrain.
The UW-Madison team is collaborating with ProtoInnovations, a Pennsylvania-based company that’s contributing its expertise in active traction control for rovers.
The goal is to equip the VIPER rover with an innovative active traction control technology that will enable more sophisticated control of the rover’s wheels. This should help prevent the wheels from slipping or spinning in place trying to get traction, which can cause extensive wear and tear on the rover. ProtoInnovations will test its active traction control for the VIPER rover using Negrut’s simulations.
Negrut says he’s encouraged by the early results from his team’s simulations. So far, the team has focused on modeling a single rover wheel and its interaction with the terrain in an effort to validate the simulations and build confidence in their results.
“What we’re starting to see is that, for a single wheel, the results from our simulations are encouraging and correspond with data measured in experiments,” he says.
While Negrut’s research has benefitted companies and the U.S. Army here on earth, this project is the first time his work could make an impact beyond our planet.
“It’s exciting to know that, if things work out, my students and I will have helped NASA with a project that puts a rover on the moon,” Negrut says. “That opportunity doesn’t happen very often.”