When Joe Berg, a senior in electrical and computer engineering at the University of Wisconsin-Madison, was deciding which classes to take for the fall semester 2023, one offering caught his eye: ECE 455, a capstone design course for undergraduates focused on developing a navigation system for autonomous underwater vehicles.
The hands-on class, designed by Electrical and Computer Engineering Assistant Teaching Professor Nathan Strachen, is not about fiddling around with remote control submarines. Its goal is for students to work on a real-world problem with huge implications: finding a way to use low-frequency magnetic fields for real-time underwater positioning, or localization.
Currently, only handful of studies have explored this, so a consistent solution could have a big impact for submarines and autonomous underwater vehicles, which usually have to surface and use GPS to find their location in the ocean.
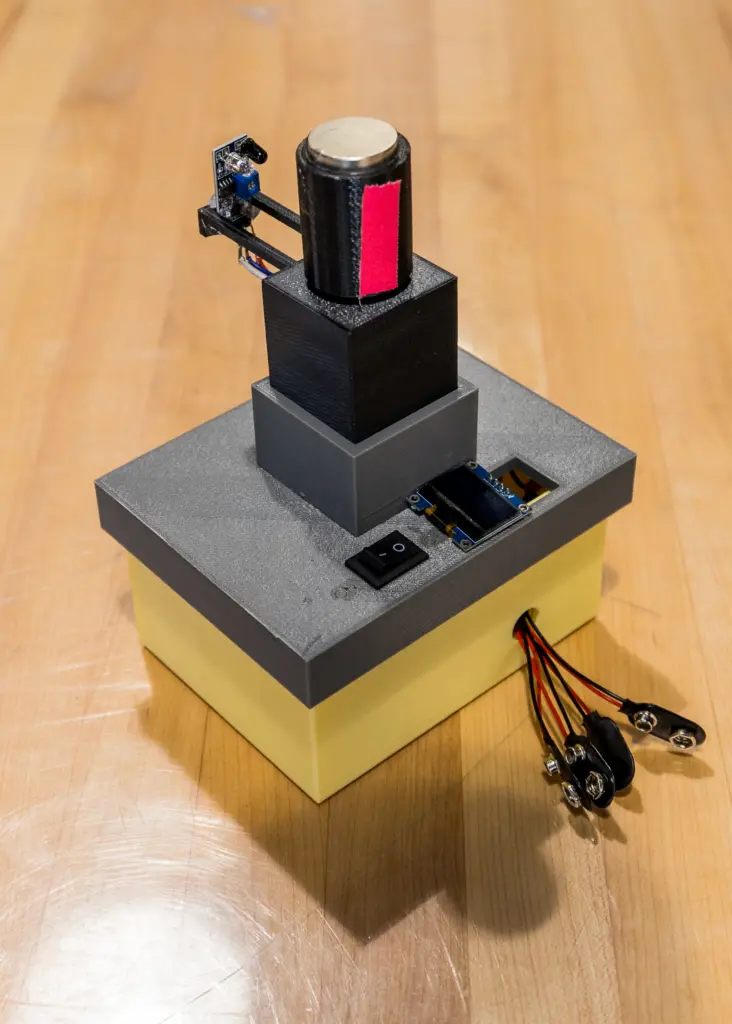 Students designed beacons using rotating magnets capable of locating targets underwater. Credit: Joel Hallberg.
Students designed beacons using rotating magnets capable of locating targets underwater. Credit: Joel Hallberg.
After accepting his teaching job with UW-Madison, Strachen started looking around for fun student competitions he might be able to bring to the university, while wrapping up his work at Sandia National Laboratories. That’s when he came across RoboSub, an international competition in which students design and demonstrate autonomous underwater vehicles. In fact, Strachen even got a grant from Sandia to set up a student RoboSub chapter at UW-Madison.
Instead of just putting up flyers and starting the group from scratch, however, Strachen thought it might be better to generate organic interest and define some of the problems the team would work on. “I studied low-frequency magnetic fields during my PhD and was already really familiar with a lot of literature on doing localization with them,” he says.
That, he thought, was a way to integrate underwater vehicles with a capstone course for ECE.
In his class, Strachen challenged the students to create devices using low-frequency magnetic fields that could pinpoint an underwater target, a novel technology. The class divided into three teams, then built magnetic beacons to be placed on the edge of a swimming pool or body of water and used to find a submerged test unit.
Over the course of the fall 2023 semester, the teams met to build and refine their devices, eventually testing them at a swimming pool in the Nicholas Recreation Center on campus during the last week of classes. While all three types of devices used spinning magnets, Strachen says the teams used very different approaches. One built smaller beacons powered by tiny quad copter motors while another made beacons out of huge spinning magnets. Another team fabricated its magnetic coils on a printed circuit board, instead of winding wire hundreds of times by hand. “I thought that was pretty cool and creative,” says Strachen.
While no team was 100% successful in locating the target dropped in the pool, Strachen says they all learned to identify the problems with their approaches. With more time, he thinks they could have gotten their beacons dialed in.
Berg says his team managed to locate the target within two meters, and believes the group could have worked out the kinks in another few months. He says he’s glad for the experience of working on the project, which challenged his problem-solving abilities and required many of the skills he’s developed over four years at UW-Madison. “The class required some circuit design, electrodynamics and mechanical engineering, and lots of 3D printing,” he says. “I think it brought everything together.”
Strachen was impressed by the students’ progress and plans to offer the “sub edition” of the capstone course again in the fall semester of 2024. In fact, he says he would like to improve the location system before officially starting the RoboSub club, since the novel technology would give the team a significant advantage.
“The lessons learned will definitely be used,” says Strachen. “Some of my students were interested in continuing to work on it. So that’s a good sign. And who knows, maybe one of them will perfect it.”
Featured image caption: Undergraduate students Joe Berg (left) and Max Kulick (right) discuss a low-frequency magnetic beacon the students built to locate an underwater target with Assistant Teaching Professor Nathan Strachen (center). Credit: Joel Hallberg.