Jack Stonecipher grew up on the shore of Light Foot Lake outside Buffalo, Minnesota, hooking bluegill, smallmouth bass and other varieties of fish that inhabit Upper Midwestern lakes.
These days, he’s building robotic fish as a PhD student in mechanical engineering at the University of Wisconsin-Madison. And he shared that work with leading robotics researchers at the 2026 Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation June 1-5 in Vienna, Austria.
Stonecipher and Wei Wang, a mechanical engineering assistant professor at UW-Madison, presented their paper on a novel robotic fish at the conference, which is considered the premier summit in the robotics and automation field. Their fish is unique because they can adjust its body stiffness, allowing it to better mimic and offer new lessons about the swimming mechanics of real fish.
 From left: Master’s student Sicheng Fu, PhD student Jack Stonecipher and Assistant Professor Wei Wang attended the 2026 International Conference on Robotics and Automation in Vienna. Submitted photo.
From left: Master’s student Sicheng Fu, PhD student Jack Stonecipher and Assistant Professor Wei Wang attended the 2026 International Conference on Robotics and Automation in Vienna. Submitted photo.
Their paper, a finalist for the conference’s Best Paper Award, was one of three manuscripts the Wang lab presented at the event.
“There are a lot of different stiffnesses in different kinds of fish, and it can be a big indicator of how they move. But it’s very difficult to actually measure,” says Stonecipher, who just finished his third year of PhD work. “Using robotic systems, we can get a better gauge of how much they’re stiffening and why they would want to do this.”
In nature, fish activate muscles, increasing the stiffness in their bodies and allowing them to accelerate. Conversely, they can also maintain efficiency in their locomotion while moving at slower speeds when their muscles are slack. Those biological machinations could hold important lessons for designing watercraft.
“Most of our current boats or underwater vehicles can only maintain a high efficiency within a very narrow speed profile,” says Wang, whose lab develops physical prototypes of aquatic robots as well as the control and sensing systems necessary to operate them. “But fish can maintain a very high efficiency over a very wide speed profile.”
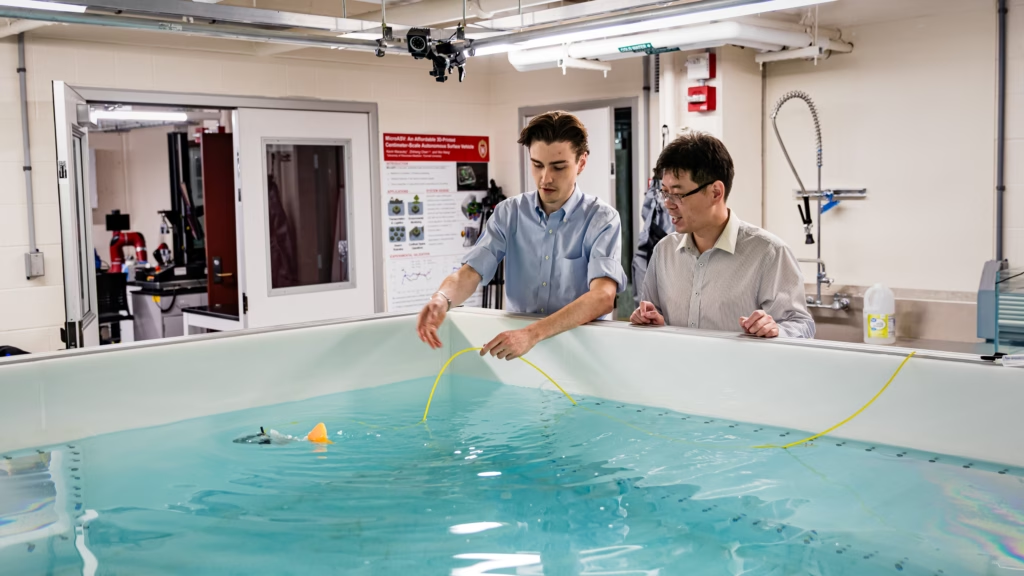 PhD student Jack Stonecipher and Assistant Professor Wei Wang operate their robotic fish in their lab in the Mechanical Engineering Building. Photo: Tom Ziemer
PhD student Jack Stonecipher and Assistant Professor Wei Wang operate their robotic fish in their lab in the Mechanical Engineering Building. Photo: Tom Ziemer
Stonecipher, Wang and former undergraduate researcher Allen Gao (BSME ’25) built their bluegill-inspired robot with a lentil-filled elastomer body that can stiffen on command without significantly changing its shape or size—courtesy of a vacuum pump, a technique known as particle jamming. With a tethered power cable, a servomotor connecting the head and body and creating an oscillating motion, and a polymer caudal (tail) fin, the fish can freely swim, allowing the researchers to test the effects of altering the body stiffness in a realistic environment. Wang says it’s the first published example of modifiable particle jamming in such a large piece of an aquatic robot.
Using a motion-tracking system, the group found that at higher motor frequencies, a stiffer body increased velocity while ensuring high efficiency (aka, a low cost of transport). Conversely, at lower motor frequencies, a softer body maximized velocity and preserved efficiency.
 PhD student Jiayi Jin has built and tested a robotic flying fish. Photo: Tom Ziemer
PhD student Jiayi Jin has built and tested a robotic flying fish. Photo: Tom Ziemer
In one of the lab’s other papers, master’s student Sicheng Fu and Wang created a robotic manta ray to test the effects of stiffness across two dimensions of the fins (down the length of the fin as well as through the width). In the third paper, PhD student Jiayi Jin and Wang designed, computationally modeled and then tested a robotic flying fish to probe the mechanics of the transitions between swimming and flying through the air.
Beyond informing watercraft design, Wang and Stonecipher see bioinspired aquatic robots as tools for ecological monitoring, where they’re able to blend in among animals and better capture photos and other data without disrupting the natural environment. They could also reveal new insights about aquatic animal movement, since it’s not possible to force a fish to selectively tense its muscles and then study the effects.
Wang’s lab continues to build new soft robotic components to mimic and examine other mechanical behaviors, including localized stiffening at different points throughout a fish’s body, while also testing their prototypes in natural environments. “I like this idea that robotics is spurred on by biological research, and then robotics can be used to inform biological research,” says Stonecipher, “and it’s kind of a cycle.”
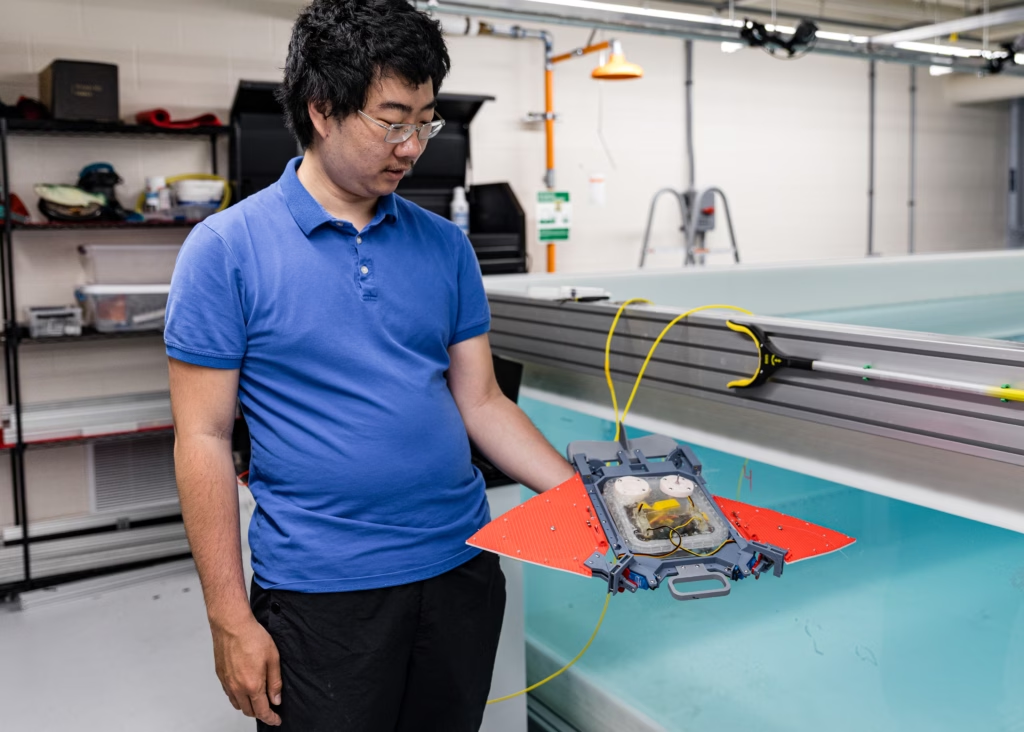 Master’s student Sicheng Fu shows off a robotic manta ray. Photo: Tom Ziemer
Master’s student Sicheng Fu shows off a robotic manta ray. Photo: Tom Ziemer